Ubuntu下建立PX4编译环境
本文讲述如何在Ubuntu操作系统下部署PX4飞控固件的编译环境。
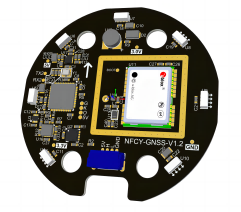
本节课讲述如何自制基于UAVCAN协议的GNSS模块,包含了一款开源硬件的设计要点和固件移植方法。这款GNSS模块支持北斗、GPS、格洛纳斯三系统联合定位,空旷地带定位卫星数轻松达到32颗。
“重新上电”是最常用的“重启飞控”的方法,但是由于大部分飞控支持“多电源供电”,因此有一定概率我们会遇到一个很奇葩的问题:虽然我们重新插拔了连接飞控的USB线,但是实际上飞控在这期间根本就没有掉电,从而飞控根本就没有重启。
你有没有遇到过这样的情景:遇到一个技术问题后,你兴冲冲地到一个技术交流群里提问,结果没有人搭理你,可是别人提的问题就会有不少大佬跳出来解答,瞬间你觉得自己被冷落了。
在APM固件的全部参数列表中,有“RC7_OPTION”和“SERVO7_FUNCTION”这两种参数,两者功能看似非常类似,同时又跟RC6_MAX、SERVO6_MAX这种参数混在一起,让人眼花缭乱,分不清楚。今天,我们就用这篇文章给大家彻底讲清楚两者的关系。
本文讲述我们买了飞控后,收货验货-更新固件-设置基本参数-校准-首次飞行-炸机后如何处理等全流程使用说明,争取解决小白可能遇到的所有问题。本文将会录制配套视频,并发布到B站上,文字+视频,保证让你彻底搞明白飞控的使用方法,其实就那么点事,真的不难。
对于运行APM固件的飞控来说,调参 貌似 一直是一种比较麻烦的事情,各种参数纠缠在一起,感觉无从下手。因此,APM固件中加入了“自动调参”的功能。本文将根据APM官网的介绍,讲述一下APM自动调参的步骤以及注意事项。同时,我还会录制一个APM自动调参的实战视频,发到各大视频平台上,视频链接将附到本文结尾。
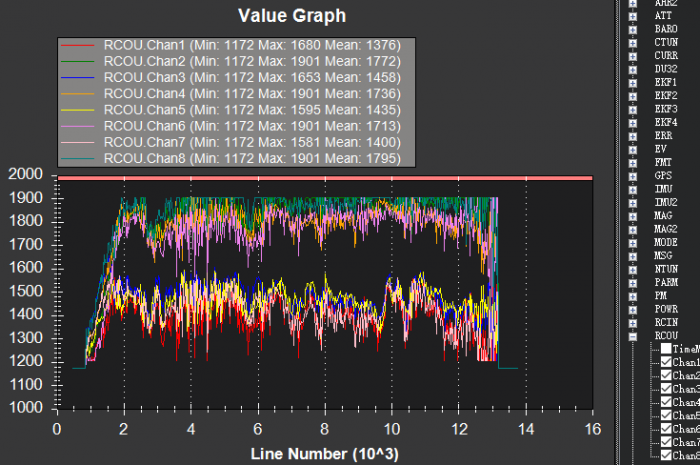
APM/Pixhawk飞控疑难杂症解决办法汇总、MissionPlanner最新版官方下载地址、APM官网地址、Pixhawk开源硬件地址、MissionPlanner源代码地址、APM官方日志分析教程……
本节课我们来实现一个有意思的功能:对于固定翼无人机(特别是小型飞翼类无人机),在takeoff模式下,将飞机前后晃动三次后自动解锁,抛飞后自动爬升到一定高度后开始盘旋,直到接收到遥控器或者地面站的其他指令。这个过程中不需要遥控器和地面站的干预,非常适合单人操作

 京公网安备 11010502039327号
京公网安备 11010502039327号