Win11下使用WSL2编译APM飞控固件
之前,我们在windows下主要使用cygwin64编译APM飞控固件,但是随着技术的进步,APM官方更加推荐Win11下使用WSL2(Windows Subsystem for Linux,即windows下的Linux子系统)来编译,下面根据APM官方教程进一步细化讲解如何建立编译环境和仿真环境。
之前,我们在windows下主要使用cygwin64编译APM飞控固件,但是随着技术的进步,APM官方更加推荐Win11下使用WSL2(Windows Subsystem for Linux,即windows下的Linux子系统)来编译,下面根据APM官方教程进一步细化讲解如何建立编译环境和仿真环境。
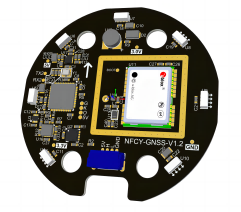
本节课讲述如何自制基于UAVCAN协议的GNSS模块,包含了一款开源硬件的设计要点和固件移植方法。这款GNSS模块支持北斗、GPS、格洛纳斯三系统联合定位,空旷地带定位卫星数轻松达到32颗。
你有没有遇到过这样的情景:遇到一个技术问题后,你兴冲冲地到一个技术交流群里提问,结果没有人搭理你,可是别人提的问题就会有不少大佬跳出来解答,瞬间你觉得自己被冷落了。
本节课我们来实现一个有意思的功能:对于固定翼无人机(特别是小型飞翼类无人机),在takeoff模式下,将飞机前后晃动三次后自动解锁,抛飞后自动爬升到一定高度后开始盘旋,直到接收到遥控器或者地面站的其他指令。这个过程中不需要遥控器和地面站的干预,非常适合单人操作
上一章节我们以OpenMV为例讲述了如何添加自定义外设的驱动,本来这一章节打算讲述如何使用OpenMV得到的图像识别结果来引导飞机飞行,但是根据我之前的经验,添加新的外设后,最好先添加一个专门记录该外设信息的日志,以便更加方便地确定外设工作是否正常,然后再添加更加顶层的逻辑代码,因此我们将OpenMV引导飞机飞行放到下一个章节。
本节课讲解飞控如何与外设通信,如何添加新的外设驱动程序。我们将会使用一个由“星瞳科技”出品的“OpenMV4 H7版”模块对特殊图案进行图像识别,然后通过串口将图像识别结果发送给飞控,飞控接收并处理这些信息,为下一节课将要讲的使用OpenMV引导飞机飞行做准备。
 京公网安备 11010502039327号
京公网安备 11010502039327号