本文为《无人机飞控固件开发教程》系列视频的辅助资料,已经在“网易云课堂”上线, 链接如下:https://study.163.com/course/introduction/1209568864.htm?share=1&shareId=1448054983
无人机调试,飞控硬件定制、固件修改,日志分析,请QQ联系:3500985284
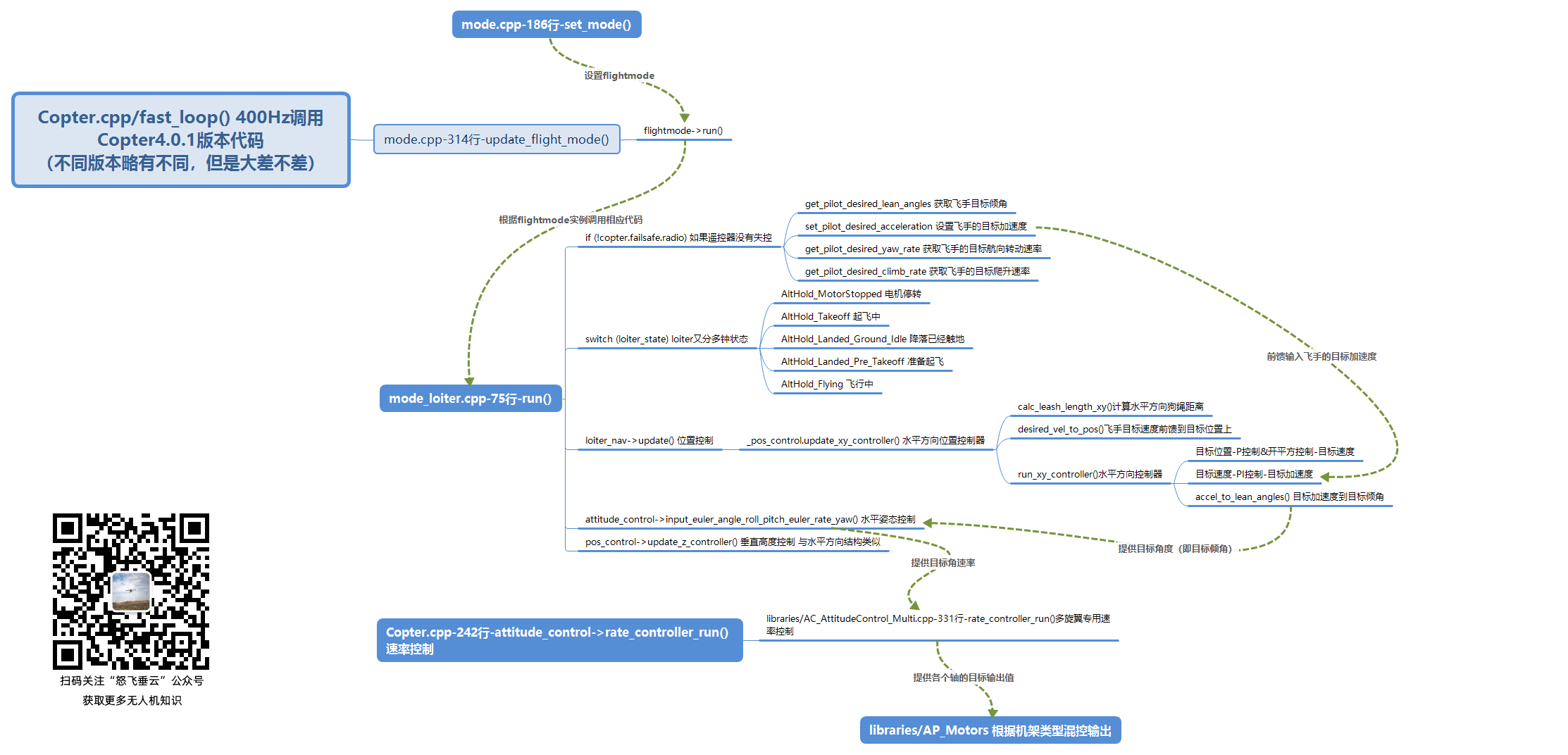
本节课以多旋翼的loiter模式为例,深入讲解APM/Pixhawk飞控飞行模式内部的控制逻辑。通过本节课的学习,可以让大家对“位置控制 -> 速度控制 -> 加速度控制 -> 角度控制 -> 角速率控制 -> 混控输出”这条控制链的代码实现有一个比较直观的认识。
在录制本节课的时候,APM飞控最新的稳定版多旋翼固件的版本号为Copter-4.0.2,因此本节课是以Copter-4.0.2版本代码为例来讲解的(咱们后面更新的视频教程,都会以录制时的最新稳定版为例来讲解,不过大部分关键代码都不会大变,大家不用担心过时的问题)。
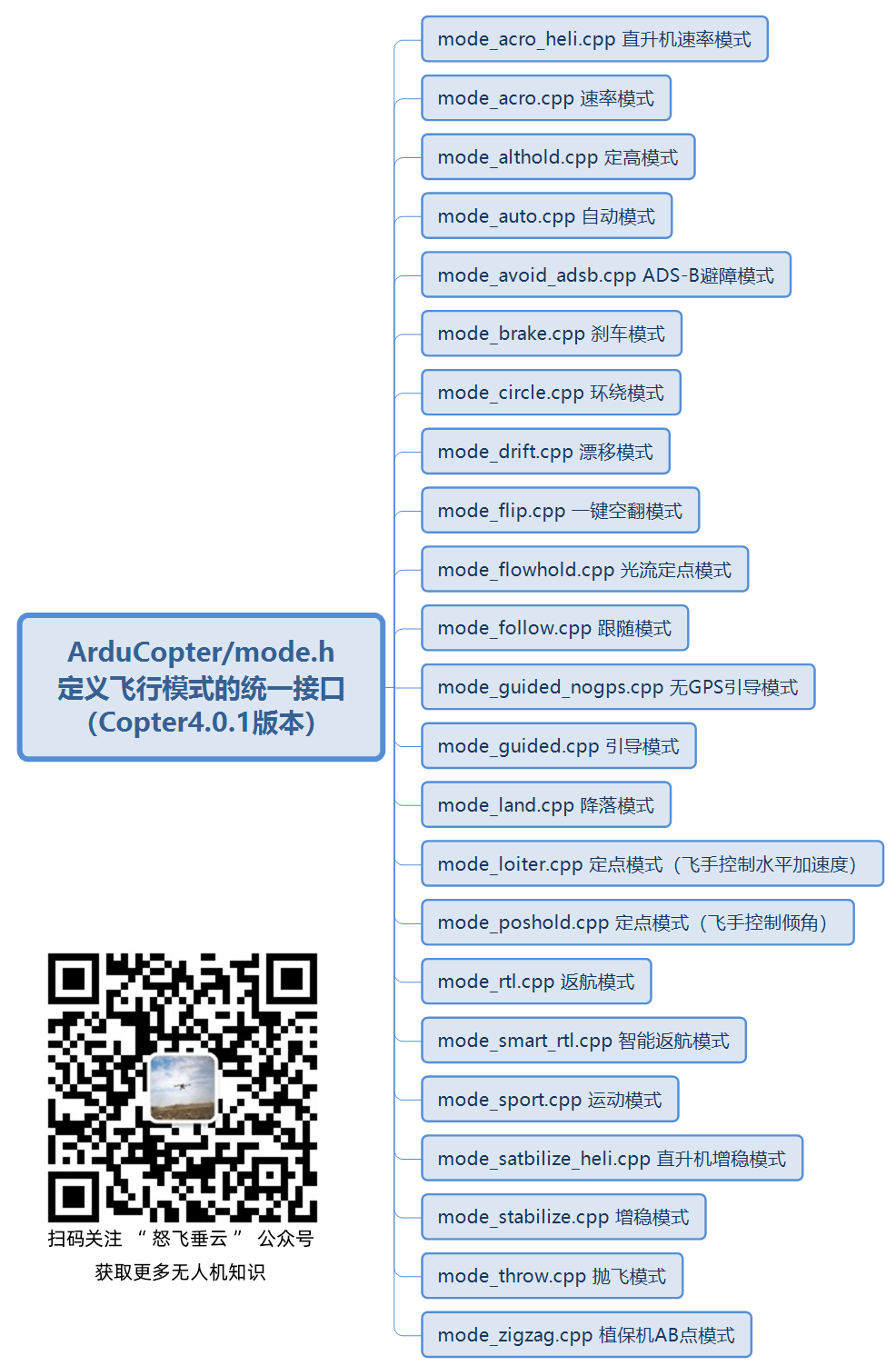
一、由mode.h派生出所有模式
二、细讲整个控制链
下图在此网页中会显示的不清楚,请将此图片从浏览器中拖动到电脑桌面,就可以看到高清原图。
无人机调试,飞控硬件定制、固件修改,日志分析,请QQ联系:3500985284

 京公网安备 11010502039327号
京公网安备 11010502039327号