搞过无人机图传的朋友都懂:调不通的时候,最崩溃的不是”坏了”,而是”不知道哪里坏了”。
摄像头没画面?网线没接好?地面站软件没设对?一条链路上好几个环节,每个都可能出问题,但你只看到一个结果——黑屏。
今天分享一个我自己开发的小工具 CamStream,专门解决这个痛点。
图传链路出问题,到底该怎么排查?
使用 RTSP 网口摄像头的无人机图传链路通常长这样:
RTSP 网口摄像头 → 网线 → 图传发射端 → 无线链路 → 图传接收端 → 地面站软件 → 显示摄像头通过网口输出 RTSP 视频流,经图传链路传到地面站。调不通时,很多人上来就拆网线、换摄像头、改 IP……折腾一圈发现是地面站拉流地址填错了。
正确的排查思路是:用一个已知正常的 RTSP 源,从地面站端开始验证,逐段往飞机端排除。
第一步:用 CamStream 模拟一个 RTSP 源,验证地面站
这是 CamStream 的核心价值所在。
很多时候问题出在地面站那一侧——拉流地址写错、端口没开、协议不对、解码设置有误——但你以为是飞机上的问题,白白浪费大量时间。
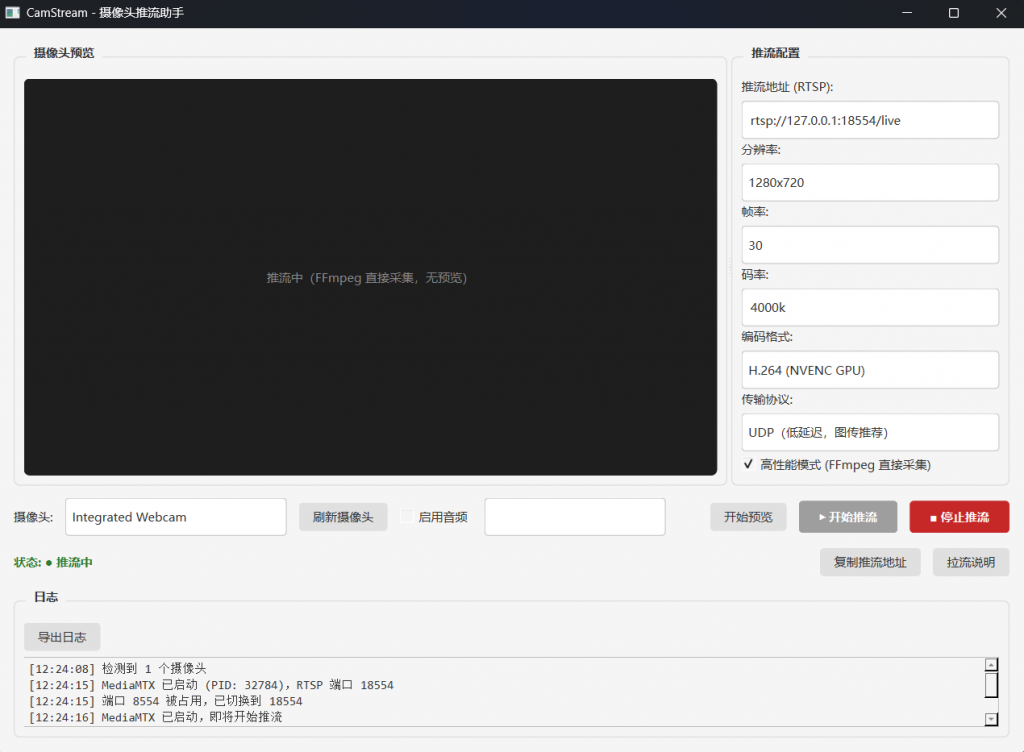
做法: 在一台电脑上打开 CamStream,随便接个 USB 摄像头(笔记本自带的也行),点「开始推流」,生成一个标准的 RTSP 流地址。然后用你的地面站软件去拉这个流:
- 拉到了,有画面 → 地面站软件和网络配置没问题,问题在飞机那一侧
- 拉不到 → 问题就在地面站这边,别去动飞机了
一下子就把排查范围砍掉一半。
第二步:排查地面站侧的具体问题
如果第一步地面站拉不到 CamStream 的流,逐项检查:
- 拉流地址 —— IP 和端口是否填对(注意不是 127.0.0.1,而是运行 CamStream 那台电脑的局域网 IP)
- 传输协议 —— CamStream 支持 UDP 和 TCP,分别试:
- UDP 拉到了 → 正常,图传场景推荐 UDP(延迟低)
- UDP 拉不到但 TCP 能拉到 → 防火墙或网络设备拦了 UDP
- 都拉不到 → IP/端口/防火墙等基础网络问题
- 防火墙 —— CamStream 会自动尝试配置 Windows 防火墙放行,如果没有管理员权限则需手动放行
- 解码能力 —— 检查地面站软件是否支持对应的编码格式(H.264/H.265)
第三步:验证飞机端 RTSP 摄像头
地面站验证通过后,问题就锁定在飞机端了。把 RTSP 摄像头从飞机上拆下来,直接用网线接到电脑,用 VLC 或 ffplay 拉一下摄像头的 RTSP 流:
vlc rtsp://<摄像头IP>:<端口>/<路径>- 能拉到 → 摄像头本身没问题,问题在图传链路(发射端、接收端、无线信道)
- 拉不到 → 摄像头有问题,继续排查:
- 网络连通性 —— 电脑和摄像头是否在同一网段,能否 ping 通
- 摄像头 RTSP 地址 —— IP、端口、路径是否正确(不同品牌的摄像头 RTSP 路径格式不同)
- 网线和接口 —— 网线是否完好,RJ45 接口是否接触良好,线序是否正确
第四步:排查图传链路
摄像头和地面站都验证没问题了,那问题就在中间的图传链路:
- 图传发射端 —— 是否正确接收到摄像头的网络数据
- 无线信道 —— 发射功率、频段、干扰、配对状态
- 图传接收端 —— 输出的网络数据是否正常转发到地面站
为什么是 CamStream?
核心场景就一个:你需要一个随时可用的、可靠的 RTSP 视频源,来验证地面站能不能正常拉流。
市面上当然有各种 RTSP 推流工具,但 CamStream 是专门为这个场景设计的:
- 开箱即用 —— 自带 RTSP 服务器(MediaMTX),不用额外部署
- 默认 UDP 低延迟 —— 图传场景下延迟就是命,默认就是最优配置
- UDP / TCP 可切换 —— 方便对比测试,快速定位协议层面的问题
- 支持 GPU 硬编码 —— NVENC 硬编码,笔记本也不卡
- 自动处理端口冲突 —— 端口被占了自动换,不用你操心
- 自动配置防火墙 —— 局域网设备直接就能拉流
- 一键复制推流地址 —— 发给同事直接用
简单说:随便找个带摄像头的电脑,打开 CamStream,点推流,你就有了一个标准的 RTSP 源。
开源免费,直接用
CamStream 已在 Gitee 开源,MIT 协议,随便用随便改:
环境要求就两个:Windows 10/11 + Python 3.10+
pip install -r requirements.txt
python main.py或者双击 run.bat 一步到位。
关于作者
怒飞垂云 —— 专注无人机飞控开发(北航毕业,2009年开始从事无人机开发工作)
长期提供以下技术服务:
- 无人机调试与联调
- 飞控硬件定制设计(已给多个客户定制多款飞控、RTK模块、电源模块等硬件)
- 飞控固件修改与适配
- 飞控日志分析与问题定位
- 飞控驱动开发与外设对接
联系方式:
- QQ:3500985284
- 博客:www.nufeichuiyun.com
- 无人机飞控开发教程:https://study.163.com/course/introduction/1209568864.htm?share=1&shareId=1448054983
欢迎关注公众号「怒飞垂云」,获取更多无人机开发干货。

 京公网安备 11010502039327号
京公网安备 11010502039327号