本文讲述如何编译MissionPlanner,将持续更新,添加如何修改MissionPlanner与源代码……
无人机调试,飞控硬件定制,固件修改,log日志分析,飞控驱动添加
请QQ联系:3500985284
经过三个月的制作,我的《无人机飞控固件开发教程》系列视频终于在“网易云课堂”上线了,本教程基于APM固件和Pixhawk硬件,讲述如何搭建飞控固件开发环境、如何编译烧写固件、如何修改固件、如何建立飞控仿真环境、如何添加自定义信息、自定义日志、如何添加外设驱动程序、如何使用OpenMV图像识别设备引导飞机飞行等,敬请支持。https://study.163.com/course/introduction/1209568864.htm?share=1&shareId=1448054983
系统要求:
1、Windows10,官方提示:不再支持win7;
2、Visual Studio 2019
一、安装编译环境
1、安装Visual Studio Community 2019,下载链接:链接;安装时,记得选择“.NET desktop development”;
2、安装Python2.7,下载链接:链接;
二、配置编译环境
打开VisualStudio,选择“工具” -> “获取工具和功能” -> “工作负载” -> 此页面右侧“安装详细信息” -> 展开“.NET桌面开发” -> 勾选“.NET Core 2.0开发工具”。
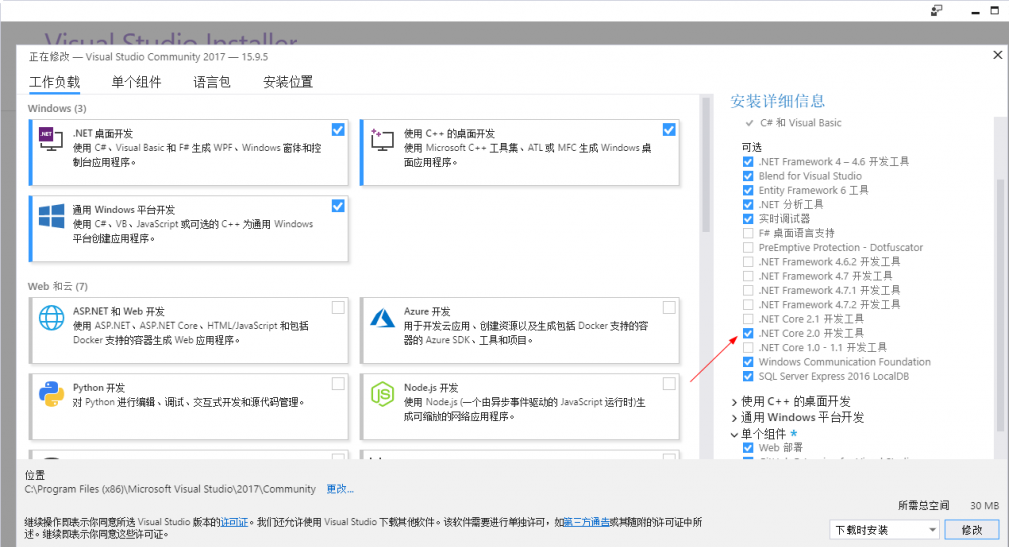
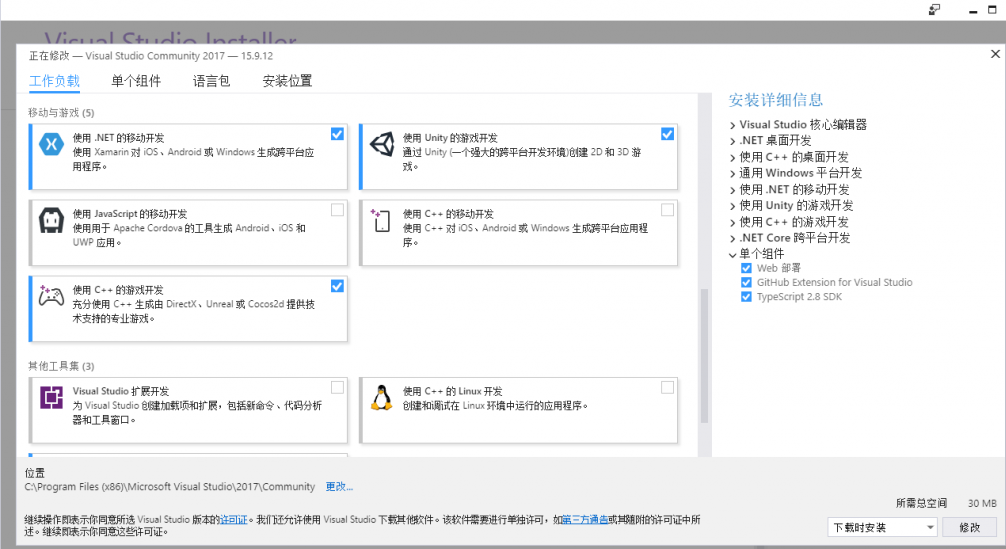
最新版的MissionPlanner源代码中加入了Android和iOS支持,需要增加“使用.NET的移动开发”功能,否则编译还是出很多错误。
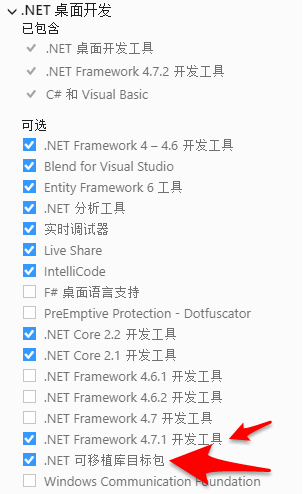
2019年6月19日更新,需要选择“.Net Framework 4.7.1”和“.Net 可移植库目标包”。
三、获取MissionPlanner源代码
使用Git将其源代码下载到本地,链接;下载方法参考:飞控代码编译方法;
加速下载方法:先在gitee上带入github中的MissionPlanner仓库,然后再从gitee上下载。
// 显示出所有稳定版的tag
git tag
// 切换到最新的稳定版(截至到2020年11月19日)
git checkout -b myMP1.3.73 MissionPlanner1.3.73
// 更新子模块
git submodule update --init --recursive四、打开MissionPlanner工程
打开VisualStudio,“文件” -> “打开” -> “项目/解决方案” ,选择刚下载的文件夹下的“MissionPlanner.sln”即可。
五、编译MissionPlanner
在编译MissionPlanner之前,你必须在当前电脑中安装有最新的官方MissionPlanner,因为Github中无法包含dll文件,而这些文件是MissionPlanner运行所必须的。
在VisualStudio中,选择“生成” -> “批生成” -> “全选” -> “重新生成”。中间可能会报错,多此重试几次就好了。
六、修改源代码
待续……
1、修改“扩展调参”界面,MissionPlanner->GCSViews->ConfigurationView->ConfigArduvopte.cs
2、修改中文翻译文件:MissionPlanner/GCSViews/ConfigurationView/ConfigPlanner.cs/ConfigPlanner.zh-Hans.resx
无人机调试,飞控硬件定制,固件修改,log日志分析,飞控驱动添加
请QQ联系:3500985284
微信公众号:“怒飞垂云”,扫描下图添加

 京公网安备 11010502039327号
京公网安备 11010502039327号